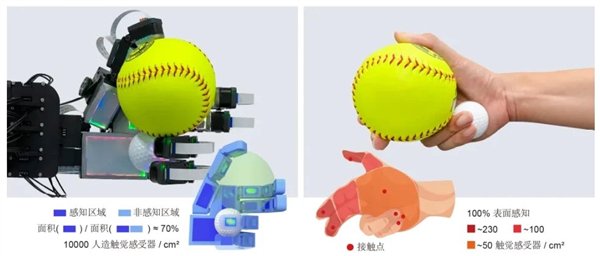
 根据Kuai Technology,6月23日,由于北京一般人工智能研究所和其他团队,“自然机器智能”最近出版了F-TAC手团队。仿生机器人手融合了表面上70%的棕榈区域的高分辨率触觉感知,从而实现了灵活性,例如夺取AI处理能力和机器人技术。人的手具有复杂的功能和主要的智力载体。获得事物需要“触觉反馈”和“运动功能”。过去,两者的包含是机器人研究的关键挑战。 F-TAC手瓶颈的手部断裂求解了传感器传感器,该传感器传感器影响了运动的灵活性并响应了硬件应用程序的实际要求,并通过软件中的联合协调运动进行了良好的处理数据。它的设计灵感来自人类的生物结构。 17个高分辨率传感器与6个调整结合在一起,空间分辨率为0.1毫米,超过商业机器人手。实验表明,在遇到障碍物时,F-TAC手可以在约100毫秒内切换技术。在600个现实世界实验中,随着触觉反馈,多个处理量的平均成功率从53.5%增加到100%。预计这一成功将促进机器人技术在医疗,工业和其他领域的应用,并开放新的方向,以开发具体的智能情报。 [本文的结尾]如果您需要重新打印,请确保指示来源:Kuai技术编辑:Suixin
根据Kuai Technology,6月23日,由于北京一般人工智能研究所和其他团队,“自然机器智能”最近出版了F-TAC手团队。仿生机器人手融合了表面上70%的棕榈区域的高分辨率触觉感知,从而实现了灵活性,例如夺取AI处理能力和机器人技术。人的手具有复杂的功能和主要的智力载体。获得事物需要“触觉反馈”和“运动功能”。过去,两者的包含是机器人研究的关键挑战。 F-TAC手瓶颈的手部断裂求解了传感器传感器,该传感器传感器影响了运动的灵活性并响应了硬件应用程序的实际要求,并通过软件中的联合协调运动进行了良好的处理数据。它的设计灵感来自人类的生物结构。 17个高分辨率传感器与6个调整结合在一起,空间分辨率为0.1毫米,超过商业机器人手。实验表明,在遇到障碍物时,F-TAC手可以在约100毫秒内切换技术。在600个现实世界实验中,随着触觉反馈,多个处理量的平均成功率从53.5%增加到100%。预计这一成功将促进机器人技术在医疗,工业和其他领域的应用,并开放新的方向,以开发具体的智能情报。 [本文的结尾]如果您需要重新打印,请确保指示来源:Kuai技术编辑:Suixin
根据Kuai Technology,6月23日,由于北京一般人工智能研究所和其他团队,“自然机器智能”最近出版了F-TAC手团队。仿生机器人手融合了表面上70%的棕榈区域的高分辨率触觉感知,从而实现了灵活性,例如夺取AI处理能力和机器人技术。人的手具有复杂的功能和主要的智力载体。获得事物需要“触觉反馈”和“运动功能”。过去,两者的包含是机器人研究的关键挑战。 F-TAC手瓶颈的手部断裂求解了传感器传感器,该传感器传感器影响了运动的灵活性并响应了硬件应用程序的实际要求,并通过软件中的联合协调运动进行了良好的处理数据。它的设计灵感来自人类的生物结构。 17个高分辨率传感器与6个调整结合在一起,空间分辨率为0.1毫米,超过商业机器人手。实验表明,在遇到障碍物时,F-TAC手可以在约100毫秒内切换技术。在600个现实世界实验中,随着触觉反馈,多个处理量的平均成功率从53.5%增加到100%。预计这一成功将促进机器人技术在医疗,工业和其他领域的应用,并开放新的方向,以开发具体的智能情报。 [本文的结尾]如果您需要重新打印,请确保指示来源:Kuai技术编辑:Suixin
根据Kuai Technology,6月23日,由于北京一般人工智能研究所和其他团队,“自然机器智能”最近出版了F-TAC手团队。仿生机器人手融合了表面上70%的棕榈区域的高分辨率触觉感知,从而实现了灵活性,例如夺取AI处理能力和机器人技术。人的手具有复杂的功能和主要的智力载体。获得事物需要“触觉反馈”和“运动功能”。过去,两者的包含是机器人研究的关键挑战。 F-TAC手瓶颈的手部断裂求解了传感器传感器,该传感器传感器影响了运动的灵活性并响应了硬件应用程序的实际要求,并通过软件中的联合协调运动进行了良好的处理数据。它的设计灵感来自人类的生物结构。 17个高分辨率传感器与6个调整结合在一起,空间分辨率为0.1毫米,超过商业机器人手。实验表明,在遇到障碍物时,F-TAC手可以在约100毫秒内切换技术。在600个现实世界实验中,随着触觉反馈,多个处理量的平均成功率从53.5%增加到100%。预计这一成功将促进机器人技术在医疗,工业和其他领域的应用,并开放新的方向,以开发具体的智能情报。 [本文的结尾]如果您需要重新打印,请确保指示来源:Kuai技术编辑:Suixin